(9提案公募: 97S29-001) (委託研究期間:平成9年9月〜平成12年3月)
液中生物ナノメーター世界の高速観察の実現に関する研究
Realization of High-rate Observation of the Bio-nanometer-World in Aqueous solution
金沢大学理学部 ○安藤敏夫
金沢大学理学部 斎藤 究
オリンパス光学工業(株)光学機器開発部 戸田明敏
1. はじめに
直接目で見ることは科学の世界では非常に重要である。ものや現象を直接見るためにこれまで様々な装置が開発されてきた。光学顕微鏡は現在でも有用な装置として広く利用されている。しかし、その空間分解能の限界のために見ることのできる世界は限られている。電子顕微鏡の発明は更なる微細な構造の観察を可能にし、様々な新しい知識を我々にもたらし、広く科学技術の進歩に貢献してきた。約10年前に誕生したばかりの原子間力顕微鏡(AFM)がもつ最大の特徴は試料の環境を選ばないという点にある。電子顕微鏡が持ち得なかった特徴である。生物試料が液中でのみ活性をもつことから、この特徴は生命科学にとって極めて有効である。液中にあって機能を営んでいる生物試料のナノメーター世界をAFMによって観察することができるようになった。これは生命科学にとって一大革新である。ところで、現状のAFMの走査速度は遅く1画像を得るのに分のオーダーの時間がかかる。生きた生物試料のナノメーター世界を観察できるとは言っても、それは実際には静止した世界であり、液中での動的振る舞いを観察することはできない。もっと高速に、それも動画像として見ることが出来なければ、AFMの貢献は限られる。この限界を打ち破ることを目指し、我々は本研究で高速AFMを開発した。DC走査モードからAC走査モードへ方針転換を迫られたが、液中にある試料の連続AFM像をフレームレート0.6秒で数十フレーム連続的に安定に撮ることに成功した。
2. 研究開発の内容
2.1 高速AFMシステムの各要素の設計と製作
(1) カンチレバー
カンチレバーについてはその共振周波数が高速化の決め手になる。試料表面をカンチレバー探針でゆっくりなぞるとカンチレバーは試料の凹凸に応じて撓む。しかし、共振周波数が低い場合には走査速度が増すとその撓みは凹凸に追随しなくなる。共振周波数を上げる最も簡単な方法は硬くすれば良い。しかし、硬くすると探針と試料との間にかかる力が増大し生体試料のように柔らかいものでは変形或いは破壊が起こってしまう。短冊型(幅w、厚さd、長さ
と表せる。Eとρは材質のヤング率と密度である。小さいバネ定数、高い共振周波数、という条件を両方とも満たすためにはカンチレバーは薄く小さくしなければならないことが分かる。3つのタイプ(タイプI、タイプII、タイプIII)のカンチレバーを試作した。タイプIは幅2μm、長さ10μmの柄の先に5μm x 5μmの広い面が続いた形になっている。厚さは90nmである。広い面にレーザー光を絞って当てる。タイプII、タイプIIIは広い面を取り去った形である。タイプIIの厚さは90nm、タイプIIIの厚さは140nmである。探針はもともと付いていないが、電子線ビーム堆積法で形成させた。カンチレバー支持部の肩に傾斜を付けて、半導体レーザー光が蹴られないように工夫した。写真1にタイプI、II及び探針部の電子顕微鏡写真を示す。
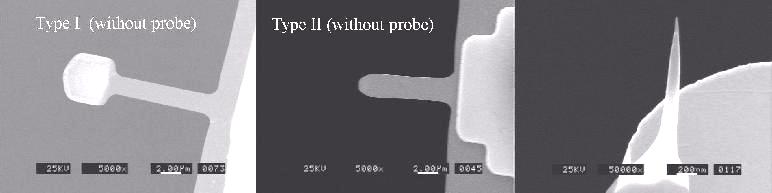
写真1:カンチレバー及び探針部の電子顕微鏡写真
(2) 変位検出光学系
カンチレバーの変位を検出する方法として光テコ法が広く使われている。
カンチレバーのサイズが従来のものよりずっと小さくなったため、カンチレバーの変位を検出するための光学系として従来のAFMで採用されている方式は使えない。半導体レーザー光を小さいスポットに絞るためには対物レンズを使わざるを得ない。そこで、従来の光テコ光学系を一部変更した対物レンズ型光テコ光学系(図1)を開発した。この光学系は調整が容易であると同時に、カンチレバーの角度を検出する方式のため短いカンチレバーを使う利点が生かされる(単位変位に対し角度変化は1.5/![]() であるため、短いカンチレバーの方が角度変化は大きい)。長さ200μmをもつ通常のカンチレバーとタイプIのカンチレバーを比較した場合、光テコ法による変位検出感度はタイプIの方が数倍高いことが確認された。垂直偏光した半導体レーザー光をレンズでコリメートし、偏光ビームスプリッターを通過させた後1/4波長板で円偏光にする。これを対物レンズで絞りカンチレバー背面に当てる。反射光は同じ対物レンズで集められ再び平行光にされる。1/4波長板を通過すると水平偏光になり、ビームスプリッターで直角に曲げられる。これを2分割フォトダイオードに導く。
であるため、短いカンチレバーの方が角度変化は大きい)。長さ200μmをもつ通常のカンチレバーとタイプIのカンチレバーを比較した場合、光テコ法による変位検出感度はタイプIの方が数倍高いことが確認された。垂直偏光した半導体レーザー光をレンズでコリメートし、偏光ビームスプリッターを通過させた後1/4波長板で円偏光にする。これを対物レンズで絞りカンチレバー背面に当てる。反射光は同じ対物レンズで集められ再び平行光にされる。1/4波長板を通過すると水平偏光になり、ビームスプリッターで直角に曲げられる。これを2分割フォトダイオードに導く。
図1:対物レンズ型光テコ光学系
(3) スキャナー
本開発研究で最も苦労した部分である。当初は、小型軽量化により共振周波数を上げる戦略を採った。この方針でいくつものスキャナーを製作し試験した。得られた最大共振周波数は20kHzであった。しかし、小型化すると、各軸間の干渉が起こり、像が歪んでしまう。共振周波数を上げる発想では限界のように思われた。共振周波数を上げられないのであれば、解決策はひとつしかない。すなわち、ピエゾを支える部分に力が及ばないようにすることである。図2の右側は従来の固定法であり、支持部に撃力が働く。それに対し、左図のような固定法では、ピエゾの伸びで上下反対方向にほぼ同じ運動量変化があるので、支持固定部にはほとんど撃力が働かない。
図2:ピエゾの支持部の違いによる撃力の差
このアイデアに基づき、図3に示すようなスキャナーを最終的に完成させた。この図ではアルミブロック2,3の下側にある球(直径1mmのステンレス球)は見えていない。下基板と天板で3つのアルミブロックを鋏み込んで、Z方向の固定をしている。ブロック1は下基板と天板に固定されているが、ブロック2と3は固定されていない。このスキャナーの特徴は、1)アルミブロックの両端にピエゾを2個対に付けたこと、2)Zピエゾのアームの長さ(アルミブロックでZ方向に固定されている位置からZピエゾまでの距離)が1mm程度と極めて短いこと、である。Zピエゾを振動させたときに現れる極めて小さい共振から、共振周波数は20kHzと見積もられた。これは十分に高いとは言えないが、共振による振幅の増大が極めて少ない(数%以下)ので問題はない。ピエゾ素子自身の共振周波数、約400kHz近くまでピエゾを振動させても、試料基板(Zピエゾの上に接着してある基板)の振幅は一定であった。また、XYスキャナー間の干渉は全く見られなかった。
図3:最終的に完成させたスキャナーの構造
(4) エレクトロニクス
2分割フォトダイオード用センサーアンプ回路、ピエゾドライブ電源、フィードバック制御回路はシステムハウスに外注して得た。センサーアンプ回路は1.5MHzまでの応答速度をもつ。ピエゾドライブ電源はnFオーダーの容量負荷をもつピエゾに対して1MHzの応答速度をもつ。フィードバック制御回路はアナログとデジタルと組み合わせたもので、パソコンによるプログラマブル機能を一部もち、XY走査及びZフィードバック走査を行う。また、試料の凹凸信号及び画像取り込みボード制御信号を出力できるようになっている。制御回路自身は100 x 100 点の走査を最速で20msecで行える能力をもつ。この制御回路の他に、パソコン・DSPにより完全にプログラマブルな制御システムを開発した。この制御の場合には、100 x 100 点の走査を最速で0.6sec程度で行える。後で説明するが、走査モードとして当初DCコンタクトモードを想定していたが、ACモードでの走査が必要になったために、RMS-DCコンバーター回路をセンサーアンプ回路に付加した。このRMS-DCコンバーター回路は1MHzまでの応答速度をもつ。
(5) AFMヘッド
AFMヘッド本体は写真2に示すように、倒立型蛍光顕微鏡IX50に搭載されている。対物レンズ型光テコ光学系の対物レンズはこの蛍光顕微観察用の対物レンズと共通である。IX50の試料ステージ、対物レンズレボルバー、ダイクロイックミラーホルダーの部分を全て取り去り、そこにAFMヘッドを組み込んだ。試料ステージ支持部に橋渡しした厚いスーパーインバー板でできたステージに全てがぶる下がるか或いは載る構造になっており、ヘッドに含まれる要素部品が相対的に垂直方向に振動することが少ない機構になっている。光テコ光学系はステージ板の下にあり、スキャナーはステージ板の上にある。試料基板とカンチレバーとの相対距離の位置決めにはハーモニックギヤ−付きのステッピングモーターを使用した。1ステップは1.3nmの変位を与える。これをZ変位の標準として利用している。カンチレバーは対物レンズに接近している必要があるため、ガラス基板に若干傾けて接着させて使う。カンチレバーとスキャナーそれぞれの水平方向の位置決めはマイクロメーターで行う。一部の部品を除き全て熱膨張率の極めて小さいスーパーインバー材を加工して作成した。
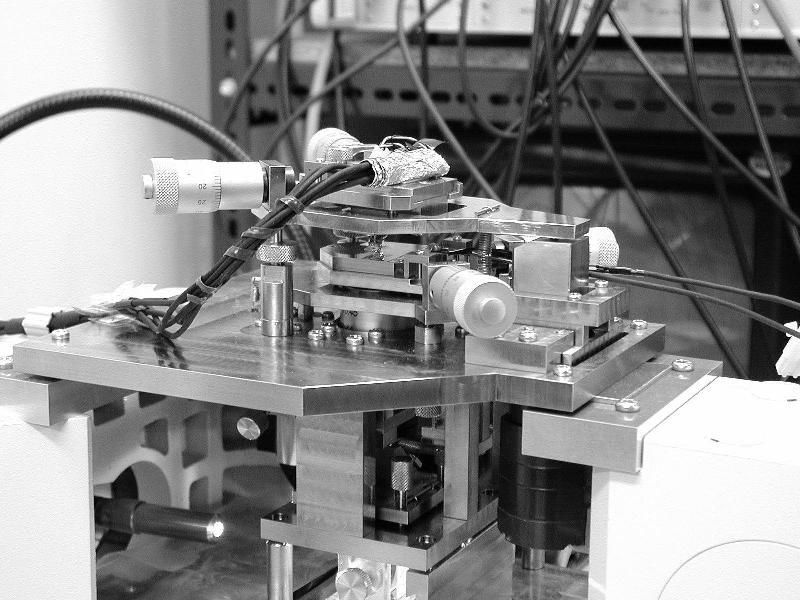
写真2:AMFヘッドの様子
2.2 各要素の試験及びその結果
(1) カンチレバーの試験
カンチレバーの共振周波数とバネ定数は熱揺らぎのパワースペクトルから見積もった。下の表にその結果を示す。タイプIIIはその厚さの割に柔らかいが、長さが若干長くなっているためである。タイプIでは、バネ定数は理想的であるが、共振周波数が低すぎる。
表1:製作したカンチレバーの力学特性
|
|
共振周波数(大気中) |
共振周波数(水中) |
バネ定数 |
|
タイプI |
354 kHz |
90 kHz |
20 pN/nm |
|
タイプII |
1,140 kHz |
336 kHz |
110 pN/nm |
|
タイプIII |
1,330 kHz |
475 kHz |
143 pN/nm |
タイプIIに至って、目標とした特性をもつカンチレバーを作製できることが判明したが、歩留まりは3%前後ではなはだ効率が悪かった。また、非常に小さいため、試料基板が或程度傾くと基板はカンチレバー探針と接触せずにカンチレバー支持部の肩にぶつかってしまう。ぶつかっているかどうかの検出は難しく、試料基板を近づけ過ぎて支持部を壊してしまい易い。このカンチレバーをタッピング走査モードにも使えるかどうかの試験を行った。それぞれの共振周波数で振動させながら探針に試料基板を近づけていったときの振幅の変化を計測した。かなり離れたところから振幅が減少していき、接触間近で振幅はゼロ近くまで減少した。これはカンチレバーが基板に近づくと大きな水圧を受けることによるが、バネ定数が小さいのでその影響が大きいためと思われる。そこで、厚さを増したタイプIIIを作成した。厚さを増したために、歩留まりがかなり向上した。このタイプでも探針を試料基板に近づけていくと振幅は減少するが、接触間近でも振幅は十分あり、接触前後で距離に対しほぼ線形に振幅が変化した。それ故、タッピング走査モードに利用可能であることが判明した。
(2) 高速制御回路の試験
制御回路の試験は、実際の物理系が絡んだ系で試験すると複数の系での応答が重なり、制御回路自身の応答を直接観察できない。そこで、模擬信号に対するフィードバック応答を観察した。正弦波信号が試料の凹凸を模擬し、加算回路後の信号がセンサー信号を模擬する回路で試験した。フィードバックが正常に動作する場合には、センサー信号は目標電圧に絶えず留まる。フィードバック量を積算してXY面内にプロットすれば、正弦波信号の画像が得られるはずである。まず、正弦波信号の代わりに直流電圧を入力した。そのとき得られた画像が図4である。画像取得時間は40msecである。この画像の高低差は6.0mVで、変位にして0.12nmである。正弦波を入力した場合の画像(取得時間40msec)が図5である。
.jpg)
.jpg)
図4:直流電圧に対する画像 図5:正弦波に対する画像
これらの結果から、制御回路自身は1画像を40msecで取得する高速走査でもフィードバックが正常にかかることが分かった。
(3) 液中でのZ走査で起こる水圧変化
上述の模擬試験からもっと実際的な系での試験を行った。Zピエゾを2つ用意し、片方に正弦波信号を加えてカンチレバーを変位させ試料の凹凸を模擬し、もうひとつのピエゾでフィードバック制御を行う。フィードバックが正常にかかれば、正弦波の凹凸画像が得られるはずである。大気中試験では正常な画像が得られたが、水中試験では得られなかった。その原因を色々と調べた結果、試料基板を高速にZ走査すると液が動かされ、それが直ぐには止まずにカンチレバーを振動させてしまうことが分かった(図6a)。そこで、試料基板の形状を水圧変化を起こしにくい
.jpg)
.jpg)
図6a: カンチレバーの振動 図6b: カンチレバーの振動
(矩形平面基板の場合) (台形円錐基板の場合)
と思われる台形円錐(上面の直径0.3〜1mm)に変えたところ水圧変化の効果は激減した(図6b)。ここでは詳細は述べないが、タッピングモードではカンチレバーを強制振動させているために、平面基板でも水圧効果を受けにくいことが分かった。
(4) 液中試料の画像取得試験
台形円錐の上面を試料基板として基板自身、或いは基板に吸着させたラテックスビーズのトポグラフィー像を得る実験を行った。走査はコンタクトDCモードである。水圧効果が無視できる走査速度で行ったが、X走査方向に縞が多く現れてしまいまともな像は得られなかった。これは探針と試料との吸着により水平方向の走査でカンチレバーが試料の凹凸とは無関係に撓むことが原因であった。カンチレバーはかなり小さいので、探針の長さを短くすると基板はカンチレバー支持部に当たってしまう。それ故、探針の長さを或る程度長くせざるを得ない。それ故、水平方向の力による大きなトルクがカンチレバーを撓ませてしまう。吸着力を減らすなど色々と試みたがきれいな画像を得ることは困難であった。
(5) 液中タッピングモード
上記のDCコンタクトモードで起こる障害を回避するために、AC走査モード(いわゆるタッピングモード)に方向転換することにした。カンチレバーが接着しているガラス基板を支えるスーパーインバーの面にピエゾを固定して振動させた(搬送振動数fb)。その振幅をRMS-DCコンバーター(4次ローパスフィルター内蔵)で計測した。内蔵アンプの位相遅れが問題にならない条件では搬送波周期の6倍から10倍程度の時間をかけないと振幅を計測できないことが分かった。100 x 100点の走査にかかる時間は最小で1.2x105/fbとなる。タイプIIIのカンチレバーで0.37秒である。タイプIIIのカンチレバーを使って、ラテックスビーズのAFM像を連続的に観察した。再現性のある連続動動像を得ることができた(図7)。フレームレートは0.6秒である。但し、この像は最終版のスキャナーで撮ったものではなく、共振周波数は高いが、XY軸

図7: 液中試料の高速連続AFM像
間に干渉がある。それ故、球が若干歪んでいる。共振周波数を犠牲にしてXY間の干渉を無くすとZスキャナーは走査中共振してしまい、画像に振動パターンがのってしまう。その例を図8に示す。高速AFMイメージングにとって如何にスキャナーが重要であるかが分かる。最終版の スキャナーは理想に極めて近いものであり、ピエゾ素子を3次元に組む方式ではこれ以上の改善はありえないと思われる。最終版のスキャナーで0.6秒/フレームの走査速度で撮った像を図9に示す。
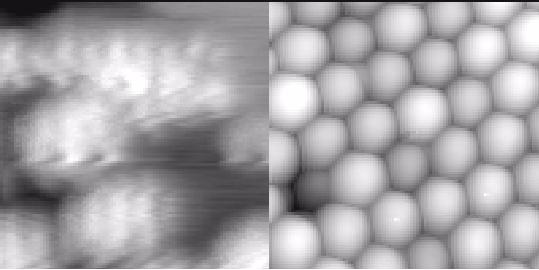
図8:共振周波数の低いスキャナー 図9:最終版のスキャナーで
で撮ったビーズの高速AFM像 撮ったビーズの高速AFM像
3. 考察
カンチレバー、センサーアンプ、変位検出光学系、スキャナー、ピエゾドライブ電源、制御回路といったAFMのハードウェアに関しては、目標とする性能を得ることができた。しかし、試料基板のZ走査にともなうカンチレバーの振動は大きな障害であった。色々な試験の結果、この振動は装置によるものではなく、急激な水圧変化によるものであることが判明した。試料基板を台形円錐にすることでこの障害は克服できた。第2の障害は、試作したカンチレバーが水平方向の力に弱いことであった。しかしながら、カンチレバーを強制振動させるタッピングモードはこれら2つの障害を克服できた。
4. まとめ
4.1 まとめ
当初念頭に置いていた走査モードはコンスタントフォースモードであったが、上記の困難に遭遇した。コンスタントフォースモードからタッピングモードに方針転換することで再現性のよい画像が得られるようになった。走査速度は後者の方が前者より遅いが仕方がない。ACモードで現在のところ0.6秒で1画像が得られるまでになった。従来の装置に比べると200倍の高速化が実現できたことになる。世界で最速の装置を開発することができた。当初の目標は1画像を40msecで撮ることであったので、まだ不十分ではあるが、今後の更なる開発でぜひとも実現したい。
4.2 今後の課題
高速化はACモードでのみ可能と思われる。このことを念頭におくと、走査速度を更に10倍上げるための戦略として2つあると思われる。(a)カンチレバーの振動振幅を1波長分のサンプリングで計測する方法の開発。(b)より高い共振周波数をもつカンチレバーの開発。RMS-DCコンバーターによる振動振幅の計測には限界がある。搬送波或いは微分したセンサー信号と同期したサンプリングを行うことで1波長分の時間で振幅を計測できる可能性がある。これが実現できれば、カンチレバーの共振周波数は液中で0.5MHz以上あればよいことになり本研究で開発したカンチレバーを若干変更するだけで良い。この方向で高速化を更に進めたい。但し、歩留まりの向上は今後の大きな課題である。まだ生物試料の動態観察を試みていないので、今回開発した装置で生物試料への応用研究を進めたい。4.3 謝辞
AFMの高速化は長年の夢であった。その研究に着手し200倍の高速化まで達成できたことはNEDOによる支援、及び当研究室の院生のたゆまぬ努力に負うところが大きい。ここに深く感謝したい。
研究成果外部発表等:
1) Sakamoto T, Amitani I, Yokota E, Ando T. Bochem. Biophys. Res. Commun. 272:586-590 (2000) Observation of Processive Movement by Individual Myosin V Molecules.”
2) 高井、戸田、安藤 平成11年得生物物理学会講演予稿集 37:Sup.S34(1999)
「高速AFMの開発」
特許等:
1) 走査型プローブ顕微鏡用スキャナー(特許出願中)
2) 原子間力顕微鏡用光テコ光学系(特許出願中)